
Импульсный датчик скорости
|
Эта запись находится в рубриках: "Полезные схемы".
Вы можете комментировать здесь либо в любимой социальной сети.
|
Импульсный датчик скорости и направления вращения преобразует скорость и направление вращения деталей механизма в один электрический сигнал для последующего измерения и индикации параметров работы. Системы автоматического управления могут использовать датчик для включения в петлю обратной связи. Информация, поступающая от датчика, необходима для формирования управляющих сигналов в системах регулирования и стабилизации параметров перемещения механических узлов автоматизированного объекта. Применения такого датчика требует контроль оборотов выходных валов редукторов, определение направления вращения двух и более синхронизируемых механизмов, учет расхода жидкости и многие другие приборы. Датчик использует всего три провода, с помощью которых подается питание и передается сигнал частоты и направления вращения в прибор системы автоматического управления. Датчик предназначен для применения в системах автоматизации поточных линий, транспортных системах и в других системах автоматического управления.
Техническая характеристика датчика
Измеряемая скорость вращения ….. 0,3…3000 об/мин
Температура эксплуатации ………… –25…+60 °С
Напряжение питания ……………….6,5…18 Вольт
Краткое описание работы
В основе работы датчика лежит преобразование перемещения в электрический сигнал которое выполняет компонент использующий эффект Холла – микросхема SS526DT производства компании Honeywell.
Датчик Холла:

Микросхема содержит два полупроводниковых элемента, генерирующих разность потенциалов при воздействии магнитного поля. Она позволяет определить скорость и направление вращения. Информация об этих параметрах поступает от микросхемы SS526DT в схему датчика с двух соответствующих выходов в цифровом виде: скорости движения соответствует частота импульсов с выхода Speed (далее Скорость), направлению соответствует логический уровень на выходе Direction (далее Направление).
Конструкция датчика скорости и направления оборотов
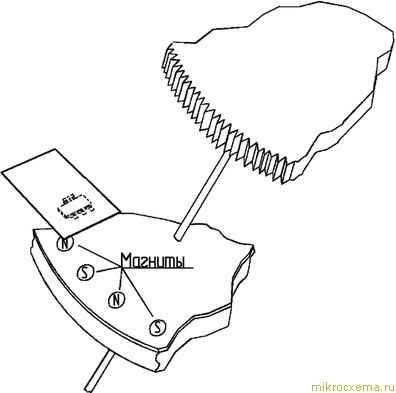
Вращательное перемещение воспринимает вал датчика через закрепленную на нем шестерню. На валу расположен диск, в котором установлены постоянные магниты. Применение неодимовых магнитов (самых сильных постоянных магнитов) позволяет уместить на диске достаточное количество малогабаритных магнитов. Свойство неодимовых магнитов при малых габаритах создавать магнитное поле достаточной напряженности делает их оптимальными для применения в этой конструкции. Установлены магниты таким образом, что полюса магнитов чередуются, что необходимо для работы микросхемы SS526DT. Внутренняя схема SS526DT, имеющая в своем составе триггер, определяет направление движения благодаря смене полярности магнитного поля, которое создается постоянными магнитами. Чем больше магнитов установлено на диске, тем выше дискретность и, следовательно, увеличивается возможность регистрации медленных перемещений, т.е. чувствительность датчика становится выше. Микросхема SS526DT устанавливается на небольшой печатной плате, соединенной проводами с основной схемой датчика, элементы которой расположены на второй печатной плате большего размера. Перемещение полюсов магнитов происходит вдоль корпуса микросхемы SS526DT. Все элементы заключены в металлический защитный экранирующий кожух.
Схема электрическая принципиальная
С выхода датчика скорости и направления поступает сигнал, передающий информацию о скорости оборотов с помощью частоты импульсов, а информация о направлении вращения передается с помощью полярности импульсов.
Выходной сигнал:
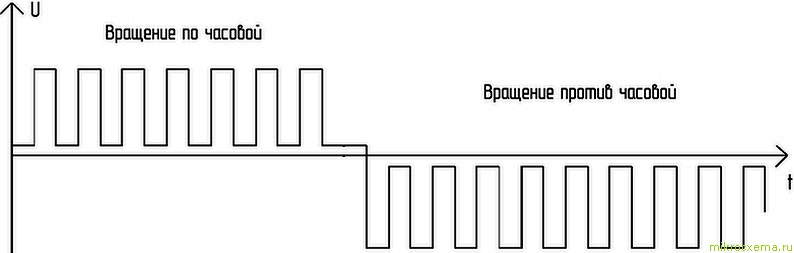
Благодаря наличию в схеме датчика источника двуполярного напряжения питания выходной сигнал размахом 5 вольт может иметь отрицательную или положительную полярность.
Функциональная схема датчика скорости и направления оборотов:
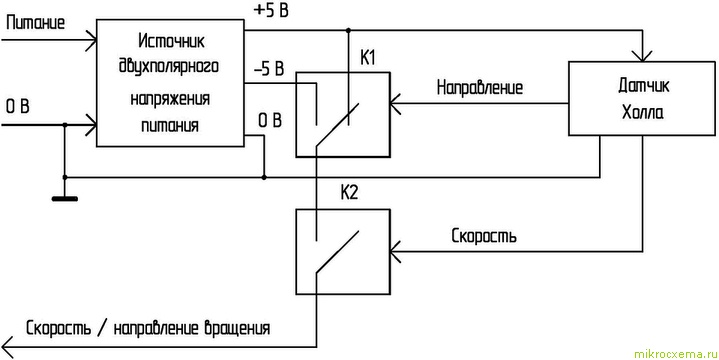
Электрическая схема преобразует сигнал от датчика Холла в выходной сигнал датчика скорости и направления вращения, обеспечивая достаточную нагрузочную способность по току. Для минимизации помех, воздействующих на кабель импульсного датчика, сопротивление приёмника сигнала должно быть небольшим. Нужно, чтобы выходной ток датчика был достаточен для принимающего прибора в целях уменьшения влияния помех, искажающих передаваемую информацию. Питание датчика подается по двум проводам. Третий провод используется для передачи сигнала, полярность которого изменяется относительно общего провода питания. Датчик Холла формирует сигнал, несущий информацию о направлении вращения, который управляет переключателем К1. В зависимости от уровня сигнала переключатель К1 подает на переключатель К2 положительное или отрицательное напряжение. Сигнал скорости датчика Холла управляет переключателем К2. Частота сигнала Скорость, сформированного переключателем К2, соответствует половине количества магнитов, размещенных на диске датчика скорости и направления вращения.
Упрощенная схема датчика и принимающего прибора:
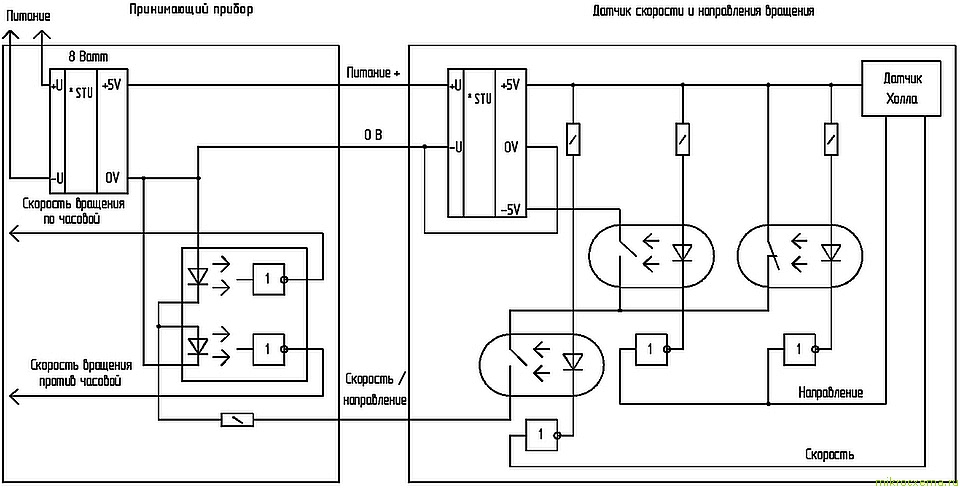
Логические элементы усиливают сигнал Направление, поступающий от датчика Холла. Логические элементы управляют светодиодами оптронов, один из которых работает на замыкание, а другой на размыкание. При низком логическом уровне сигнала Направление светодиоды оптронов не светятся. Также замкнуты контакты оптрона работающего на размыкание, на контакты оптрона сигнала Скорость подано напряжение + 5 вольт от встроенного двухполярного импульсного источника питания. При высоком логическом уровне сигнала Направление через светодиоды оптронов, управляющих полярностью выходного сигнала датчика скорости и направления вращения, проходит ток, положение контактов оптронов таково, что выходной оптрон подключается к напряжению минус 5 вольт. Сигнал Скорость через усиливающий логический элемент поступает на управление выходным оптроном. Под действием сигнала скорость с выхода датчика поступают импульсы, полярность которых задана сигналом Направление. Применение оптрона на выходе датчика позволяет увеличить нагрузочную способность, что дает возможность передавать сигнал увеличенным током для повышения помехоустойчивости.
На входе принимающего устройства сигнал дешифруется перед измерением частоты. С помощью сдвоенного оптрона в принимающем приборе сигнал, несущий информацию о скорости вращательного перемещения направляется на один из проводов, соответствующий направлению перемещения. Провода “Скорость вращения по часовой” и “Скорость вращения против часовой” подключаются к частотоизмерительным контурам схемы принимающего прибора. В зависимости от того, на каком проводе появляется сигнал, схема распознает направление перемещения. При включении светодиодов как указано на схеме работать будет только один оптрон в зависимости от полярности импульсов входящего сигнала Скорость/направление. Для увеличения помехозащищенности параллельно светодиодам можно подключить резисторы, увеличивающие ток, протекающий по проводу “Скорость/направление”.
Электрическая схема датчика скорости и направления оборотов:
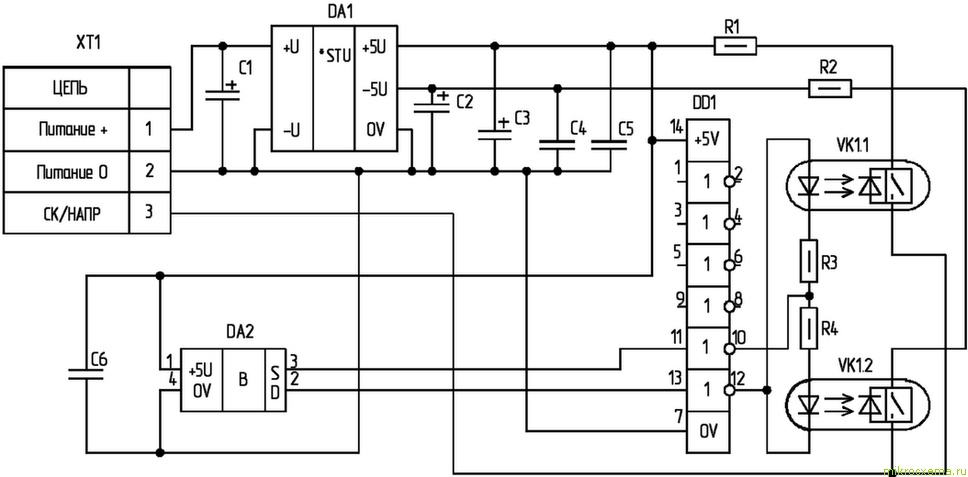
Рассмотренный порядок работы реализован в электрической схеме датчика скорости и направления вращения. Сигнал Направление поступает с выхода D микросхемы, использующей эффект Холла, DA2. Высокий логический уровень сигнала Направление преобразуется инвертором, входящим в состав микросхемы DD1, в низкий на выводе 12. Светодиод оптрона VK1.2 получает возможность работать при появлении высокого логического уровня на выводе 10 микросхемы DD1. Одновременно с этим запрещается работа светодиода оптрона VK1.1, так как на анод светодиода подано напряжение низкого логического уровня. Таким образом, благодаря соединению светодиодов оптронов с логическим элементом как изображено на схеме сигнал Направление устанавливает, через какой из оптронов будет проходить сигнал, поступающий с вывода 10 микросхемы DD1. Сигнал скорости оборотов поступает с выхода S микросхемы DA2 на вход инвертора микросхемы DD1. Высокий уровень импульсов, поступающих с вывода 10 микросхемы DD1, заставляет течь ток через резистор R4 и светодиод оптрона VK1.2. Функции оптронов разделяются следующим образом: оптрон VK1.1 формирует сигнал положительной полярности на контакте 3 клеммы XT1, оптрон VK1.2 – отрицательной. В схему датчика входит источник питания, преобразующий однополярное напряжение питания в двухполярное питание схемы. Конденсаторы, входящие в схему датчика, сглаживают помехи, уменьшая их влияние на формирование выходного сигнала. Резисторы R1, R2 задают выходной ток нашего импульсного датчика. Их номинал может быть переопределен в зависимости от входной цепи приёмника для их согласования. Схема использует один сдвоенный оптрон VK1, что позволяет сократить площадь печатной платы и сформировать сигналы Скорость и Направление вращения, используя один компонент.
Радиодетали в схеме
Параметры импульсного датчика во многом обуславливают примененные компоненты его электрической схемы. Диапазон изменения напряжения питания, при котором способен работать датчик скорости и направления вращения обуславливает преобразователь напряжения DA1. Верхний предел измерения скорости вращения зависит от быстродействия оптрона VK1. Применение конденсаторов с наименьшим тангенсом угла потерь сочетание конденсаторов с различными типами диэлектрика использование последних разработок в области конденсаторов позволяет добиться наиболее высоких результатов. При чрезмерном увеличении емкости существует опасность “перегрузить” преобразователь напряжения DA1, что приведет к срабатыванию защиты по току в момент подачи питания и схема “не будет подавать признаков жизни”. При выборе типа оптореле VK1 оценивается его быстродействие и частота импульсов, поступающих на вход оптореле. Правильный выбор VK1 позволит уменьшить стоимость датчика. Микросхема DD1 выполняет функцию простейшего усилителя по току и может быть заменена другой микросхемой. Клемма XT1 предназначенная для монтажа на печатную плату, может быть заменена на другой элемент разъемного соединения.
C1…C3 Конденсатор EMR 47 мкФ 50 В ф. Hitano
C4…C6 Конденсатор SMD 0805 2,2 мкФ 16 В
DA1 Преобразователь напряжения TMR 3-1221WI ф. Traco power
DA2 Микросхема SS526DT ф. Honeywell
DD1 Микросхема КР1533ЛН1
R1, R2 Резистор 300 Ом ±5%
R3, R4 Резистор 180 Ом ±5%
VK1 Оптореле 249КП10АР
ХТ1 Клемма LMI 107 203 51
Модифицирование импульсного датчика в зависимости от скорости вращения
Для различных применений требуется измерять различные диапазоны изменения скорости вращения, меняются требования к скорости определения смены направления вращения. Возможно применение датчика для скоростей 1 оборот в минуту и менее. При таких скоростях нужно увеличивать количество магнитов на диске, применять магниты с наименьшими габаритами и уменьшать зазор между микросхемой DA2 и плоскостью диска. Если скорости 5000 и более оборотов в минуту количество магнитов можно уменьшить. При этом наибольшая измеряемая скорость ограничена только конструктивными особенностями датчика. При уменьшении количества магнитов уменьшаются требования к наивысшей рабочей частоте компонентов схемы.

Метки: полезно собрать
Радиолюбителей интересуют электрические схемы:
Предусилитель и регулятор тембра
Всеволновой малошумящий антенный усилитель
конечно не совсем в тему,но есть такой вопрос.мне нужно найти схему на плавную регулировку оборотов двигателя со стиральной машинки,точнее советской на примерно 180-200 ватт.просто к нему цепляется одно устройство и с него надо брать характеристики на разных оборотах,может кто знет как это сделать?
19 августа 2013 в 22:57